Hintergründe
IoT ist in fast jedem Forum zu Elektronik und Computern in den Top 10. Auch in der Modellbahnelektronik hat IoT bereits Einzug gehalten.
Nachdem MBCAN aus meiner Sicht die Abschlussreife erreicht hat reizte es mich, mit IoT einen für mich neuen und erweiterten
Ansatz zur Steuerung von Märklin®-Modelleisenbahnen zu starten.
Meine Produktlinie zeichnet sich durch folgende Randbedingungen aus:
- Aufbau eines nicht-kommerziellen Projekts für den Hobby-Bereich
- Nutzen des von Märklin® veröffentlichten CAN-Protokolls über TCP/IP
- Liefern von Denkanstößen und Ideen für andere interessierte Modellbahnern
- Erfüllen meiner eigenen Anforderungen an Modellbahn-Zubehör
TWCAN ist dabei nicht zwingend kompatibel zu anderen CAN- oder IoT-Projekten aus der Modellbahnwelt, wohl aber zu MBCAN.
Es soll Denkanstöße und Ideen für andere interessierte Modellbahnern liefern.
Wenn mir das gelingt, habe ich mein Ziel erreicht.
| Artikel auf dieser Seite | |
|---|---|
 |
Die Anforderungen an TWCAN |
|
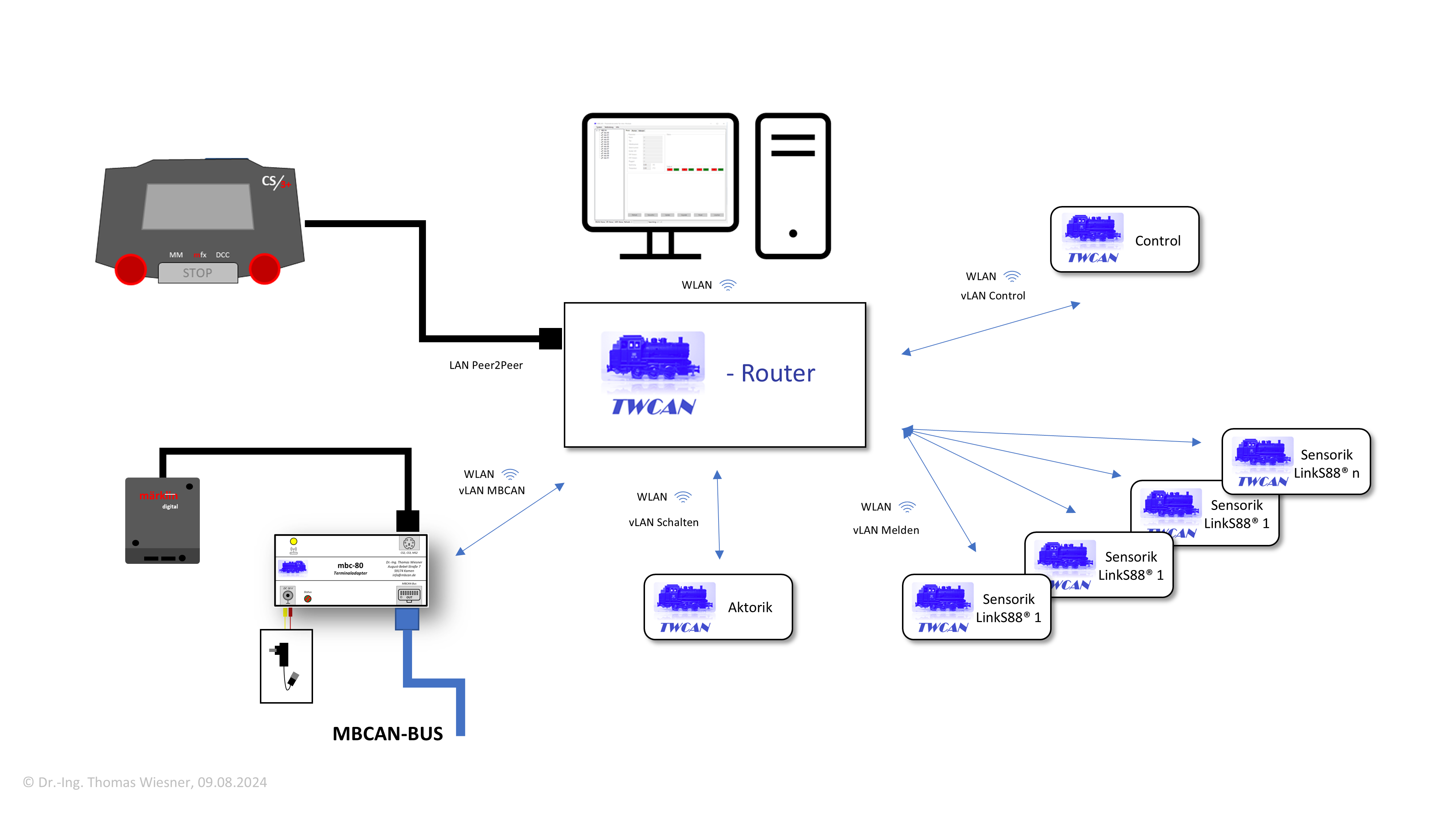
Die Systemarchitektur des TWCAN-Projekts |
|
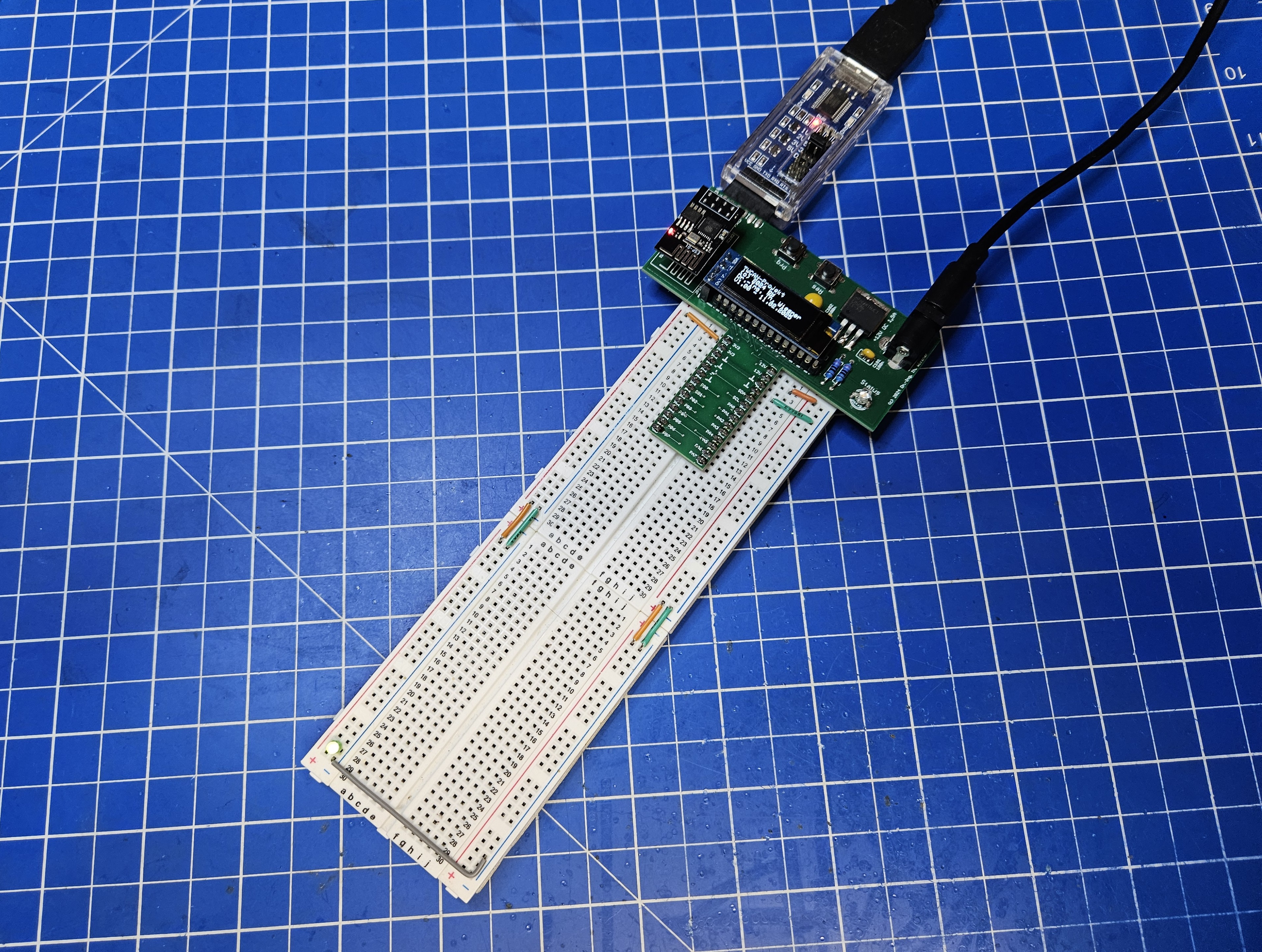
Die Basishardware des TWCAN-Projekts |